Kawasaki Heavy Industries has unveiled CORLEO—a hydrogen-powered quadruped mobility vehicle—at the Osaka-Kansai Expo 2025. This off-road personal transport system combines advanced robotics with clean energy technology, allowing riders to traverse challenging landscapes previously inaccessible to conventional vehicles.

CORLEO operates on four independent robotic legs equipped with rubber hooves featuring a divided structure that provides grip across diverse terrains—from rocky areas to grasslands and rubble fields. The quadruped design enables stable movement across uneven surfaces, with the rear leg unit swinging independently from the front to absorb shocks during walking and running.
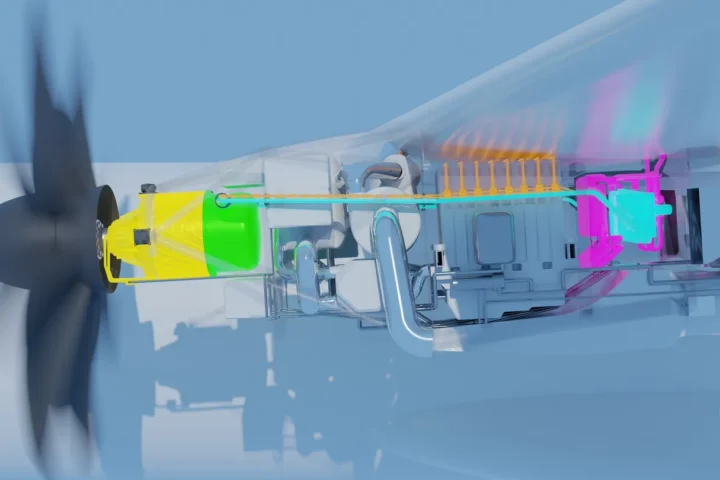
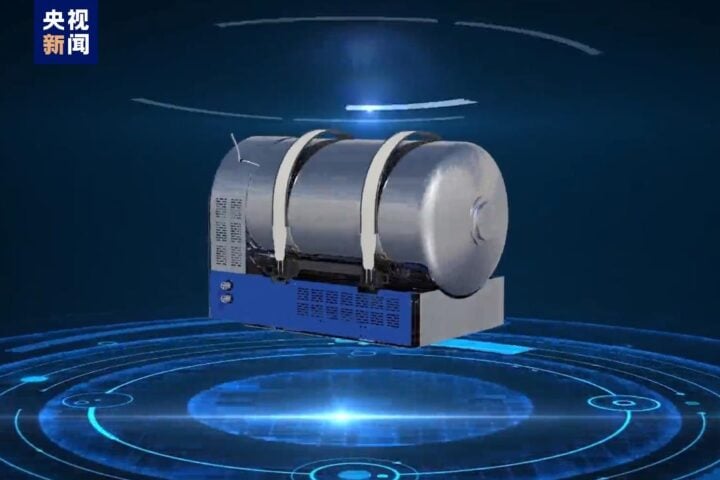
Power comes from a 150cc hydrogen engine that generates electricity for the drive units installed in each leg. Hydrogen is supplied from a canister mounted at the rear of the vehicle, producing only water vapor as emission—aligning with global decarbonization goals.

What sets CORLEO apart from traditional off-road vehicles is its intuitive control system. Rather than using conventional buttons or levers, the machine responds to the rider’s weight shifts detected through steps and handlebars. This creates what Kawasaki describes as a “reassuring sense of unity between human and machine.”
An instrument panel displays critical information including hydrogen levels, route guidance, and center of gravity position. For night navigation, the system projects markers onto the terrain ahead, illuminating the optimal path forward.

The motorcycle-inspired design features a streamlined body constructed from metal and carbon materials. A head-like shield at the front incorporates integrated lighting for visibility in various conditions.
Similar Posts:
While technical specifications such as maximum speed, range, and weight capacity remain undisclosed, Kawasaki has positioned CORLEO as a long-term vision with potential market introduction around 2050. This timeline aligns with Japan’s broader Green Growth Strategy targeting net-zero emissions by mid-century.
The concept merges Kawasaki’s 50+ years of robotics expertise with its motorcycle engineering heritage. The company has previously developed industrial robots and other quadruped platforms, including the Bex and Kaleido models showcased at the 2021 International Robot Exhibition.

CORLEO addresses several limitations of wheeled vehicles. Its legs can adapt to terrain variations without requiring established paths, potentially offering applications beyond recreation—including emergency response in disaster zones and scientific exploration in remote areas.

Hydrogen power presents both advantages and challenges. While providing zero-emission operation, the current scarcity of hydrogen refueling infrastructure remains a practical constraint—though Japan plans to establish approximately 1,000 hydrogen stations by 2030 according to the Ministry of Economy, Trade and Industry.

CORLEO exemplifies a shift toward biomimetic mobility solutions that work with natural landscapes rather than requiring modified environments. As both robotics technology and hydrogen infrastructure continue developing, this concept suggests a future where transportation adapts to the environment instead of the reverse.
Frequently Asked Questions
CORLEO is a hydrogen-powered quadruped mobility vehicle developed by Kawasaki Heavy Industries. Unlike traditional off-road vehicles with wheels, CORLEO moves on four independent robotic legs with rubber hooves, allowing it to navigate challenging terrains like rocky areas, grasslands, and rubble fields that conventional vehicles cannot access. Its unique design enables stable movement across highly uneven surfaces without requiring established paths.
CORLEO is powered by a 150cc hydrogen engine that generates electricity for the drive units installed in each leg. The hydrogen is supplied from a canister mounted at the rear of the vehicle. It produces only water vapor as emission, making it an environmentally friendly transportation option that aligns with global decarbonization goals and Japan’s Green Growth Strategy targeting net-zero emissions by mid-century.
CORLEO features an intuitive control system that responds to the rider’s weight shifts detected through steps and handlebars, rather than using conventional buttons or levers. This creates what Kawasaki describes as a “reassuring sense of unity between human and machine.” An instrument panel displays critical information including hydrogen levels, route guidance, and center of gravity position. For night navigation, the system projects markers onto the terrain ahead, illuminating the optimal path forward.
Kawasaki has positioned CORLEO as a long-term vision with potential market introduction around 2050. This timeline aligns with Japan’s broader Green Growth Strategy targeting net-zero emissions by mid-century. Currently, the concept is being showcased at the Osaka-Kansai Expo 2025 as a future mobility solution rather than an immediate commercial product.
Beyond recreational use, CORLEO shows promise for emergency response in disaster zones where conventional vehicles cannot navigate debris or damaged infrastructure. It could also be valuable for scientific exploration in remote areas, conservation efforts in sensitive ecosystems, and industrial applications in rugged terrains. Its ability to adapt to terrain variations without requiring established paths makes it versatile for numerous specialized tasks.
The primary challenge for CORLEO’s widespread adoption is the current scarcity of hydrogen refueling infrastructure. While Japan plans to establish approximately 1,000 hydrogen stations by 2030 according to the Ministry of Economy, Trade and Industry, the global hydrogen infrastructure remains limited. Additional challenges may include regulatory frameworks for this new vehicle category, manufacturing costs, and the need to further develop the technology for consumer reliability and safety standards.